2026-07-05
第 1 章 绪论
译稿来自《A First Course in the Finite Element Method》学习整理,保留原章节编号、公式编号和图号;内容仍建议结合原书校对。
本章译稿根据 MinerU 生成的章节 Markdown 整理。为便于学习,译文保留原章节编号、公式编号、图号和参考文献编号;对明显 OCR 错误作了轻微校正。
本章目标
学完本章后,你应能够:
- 说明有限元法(finite element method)的基本概念。
- 概述有限元法的发展历史。
- 了解矩阵记号在有限元中的作用。
- 说明计算机在有限元法发展和应用中的作用。
- 列出有限元法求解问题的一般步骤。
- 识别有限元法中常见的单元类型。
- 举例说明有限元法的典型应用。
- 总结有限元法的主要优点。
序言
有限元法是一种用于求解工程问题和数学物理问题的数值方法。工程和数学物理中许多问题都可以用有限元法处理,例如结构分析、热传导、流体流动、质量传输以及电磁势问题。
对于几何形状、载荷和材料性质都很复杂的物理系统,通常很难得到解析数学解来描述系统响应。所谓解析解,是指由数学表达式给出未知量在物体任意位置处的值,因此理论上对物体中的无限多个位置都有效。解析解通常需要求解常微分方程或偏微分方程。工程师、物理学家和数学家建立这些方程,是为了减少昂贵的样机制造和试验。然而,由于几何、载荷和材料特性往往很复杂,这些微分方程常常无法求得解析解。因此,我们需要依赖有限元法这样的数值方法,对这些方程的解进行近似。
有限元法将问题表述为一组联立代数方程,而不是直接求解微分方程。这类数值方法在连续体的有限个离散点上给出未知量的近似值。把一个物体划分为若干较小的有限单元,并通过公共节点、边界线或边界面彼此连接起来,这一过程称为离散化(discretization)。图 1-1 分别给出了混凝土坝截面和自行车扳手的二维离散模型:坝体被划分为 490 个平面三角形单元,扳手被划分为 254 个平面四边形单元。在两个模型中,各单元都通过节点和单元边界相互连接。在有限元法中,我们不是一次性求解整个物体,而是先为每个有限单元建立方程,再将这些方程组合起来得到整体解。
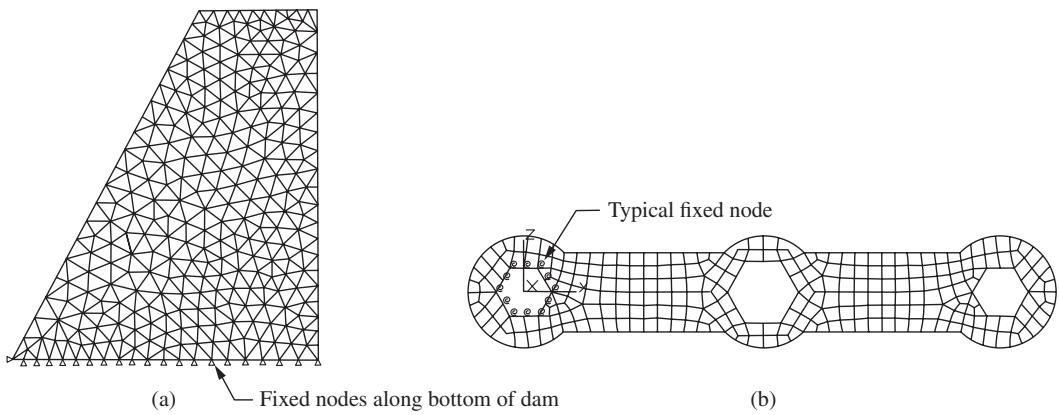
图 1-1 二维模型:(a) 离散化的坝体;(b) 离散化的自行车扳手。图中未示出外载荷;所有单元和节点均位于同一平面内。
简要地说,在结构问题中,求解通常意味着确定受载结构中每个节点的位移,以及组成结构的各个单元中的应力。在非结构问题中,节点未知量可能是温度、流体压力等,它们由热流、流体通量等引起。
本章首先回顾有限元法的发展历史。通过这段历史可以看到,有限元法真正成为解决工程问题的实用工具,主要是在过去几十年中随着高速电子数字计算机的发展而实现的。随后,本章介绍矩阵记号,并说明矩阵方法为何适合用来建立有限元方程。接着讨论数字计算机在求解复杂问题所对应的大型联立代数方程组中的作用,以及基于有限元法的大量计算程序的发展。之后,本章给出有限元求解问题的一般步骤,其中也会讨论可用于有限元分析的单元类型。最后,本章通过若干代表性应用说明有限元法解决复杂几何、多材料和不规则载荷问题的能力,并总结有限元法在工程和数学物理问题中的优点,以及有限元程序的一些常见特性。
1.1 简史
本节简要介绍有限元法在结构、非结构工程领域以及数学物理中的发展历史。这里列出的参考文献用于补充这段简要历史背景。
现代有限元法的发展始于 20 世纪 40 年代的结构工程领域。Hrennikoff 于 1941 年、McHenry 于 1943 年使用由一维线单元(杆和梁)构成的格架来求解连续固体中的应力。Courant 在 1943 年发表了一篇多年后才被广泛认识到重要性的论文,他提出以变分形式建立应力求解问题,并在组成整体区域的三角形子区域上引入分片插值函数(也称形函数),以获得近似数值解。Levy 在 1947 年发展了柔度法或力法;1953 年,他的工作表明另一种方法,即刚度法或位移法,可能适合用于分析静不定飞机结构。不过,由于这些方程用手工求解非常繁琐,所以直到高速数字计算机出现后,该方法才真正流行起来。
1954 年,Argyris 和 Kelsey 利用能量原理发展了矩阵结构分析方法。这一进展说明了能量原理在有限元法中将发挥重要作用。
二维单元的最早系统处理来自 Turner 等人在 1956 年的工作。他们推导了桁架单元、梁单元以及平面应力问题中三角形和矩形二维单元的刚度矩阵,并概述了现在通常称为直接刚度法的整体结构刚度矩阵形成过程。20 世纪 50 年代初高速数字计算机的发展,加上 Turner 等人的工作,推动了用矩阵记号表示有限元刚度方程的进一步发展。Clough 在 1960 年使用三角形和矩形单元进行平面应力分析时,引入了“finite element”这一术语。
1961 年,Melosh 建立了平面矩形薄板弯曲单元的刚度矩阵。随后,Grafton 和 Strome 在 1963 年为轴对称壳体和压力容器发展了曲面壳弯曲单元刚度矩阵。
有限元法向三维问题的扩展伴随着四面体刚度矩阵的发展。Martin 于 1961 年,Gallagher 等人于 1962 年,Melosh 于 1963 年分别作出了相关贡献。Argyris 于 1964 年研究了更多三维单元。轴对称实体这一特殊情形则由 Clough 与 Rashid,以及 Wilson 在 1965 年进行了研究。
直到 20 世纪 60 年代初,大多数有限元工作仍主要处理小应变、小位移、弹性材料行为和静载荷问题。不过,Turner 等人在 1960 年研究了大挠度和热分析问题,Gallagher 等人在 1962 年研究了材料非线性问题,Gallagher 与 Padlog 在 1963 年开始处理屈曲问题。Zienkiewicz 等人在 1968 年将该方法扩展到黏弹性问题。
1965 年,Archer 在发展一致质量矩阵时考虑了动力分析问题。这类矩阵适用于结构分析中具有分布质量的系统,例如杆和梁。
Melosh 在 1963 年认识到有限元法可以建立在变分形式之上,这使得有限元法开始用于非结构问题。轴的扭转、流体流动、热传导等场问题分别由 Zienkiewicz 与 Cheung、Martin、Wilson 与 Nickel 等人求解。
之后,有限元法又通过加权余量法得到进一步扩展。Szabo 与 Lee 在 1969 年首先用它推导结构分析中已知的弹性方程;Zienkiewicz 与 Parekh 在 1970 年将其用于瞬态场问题。人们由此认识到,当直接公式或变分公式难以使用甚至无法使用时,加权余量法常常是合适的。例如,Lyness 等人在 1977 年将加权余量法用于磁场求解。
1976 年,Belytschko 研究了大位移非线性动力行为相关问题,并改进了求解所得方程组的数值技术。关于这些主题,可进一步参考 Belytschko、Liu、Moran 以及 Crisfield 的相关教材。
有限元法的一个较新应用领域是生物工程。该领域仍面临许多困难,例如非线性材料、几何非线性以及不断被发现的其他复杂性。
从 20 世纪 50 年代初至今,有限元法在解决复杂工程问题方面取得了巨大进展。工程师、应用数学家和其他科学工作者无疑还会继续开发新的应用。关于有限元法的详细书目,可参阅 Kardestuncer、Clough 或 Noor 的相关工作。
1.2 矩阵记号简介
矩阵方法是有限元法中的必要工具。它可以简化单元刚度方程的建立,便于手算若干小规模问题,更重要的是,它适合编写可在高速电子数字计算机上运行的程序。因此,矩阵记号为书写和求解联立代数方程组提供了一种简单、易用的表示方式。
附录 A 讨论了本书所用的重要矩阵概念。这里仅对本书使用的记号作简要说明。
矩阵是由若干量按行和列排列形成的矩形阵列,常用于表达和求解代数方程组。作为后续章节将讨论的例子,结构中各节点或点 $(1,2,\ldots,n)$ 上作用的力分量 $( F _ { 1 x } , F _ { 1 y } , F _ { 1 z } , F _ { 2 x } , F _ { 2 y } , F _ { 2 z } , \dots , F _ { n x } , F _ { n y } , F _ { n z } )$ 以及相应的节点位移集合 $( u _ { 1 } , \nu _ { 1 } , w _ { 1 } , u _ { 2 } , \nu _ { 2 } , w _ { 2 } , . . . , u _ { n } , \nu _ { n } , w _ { n } )$ 都可以表示为列矩阵:
注:上式来自 OCR 结果,其中个别分量可能有识别误差;本节重点是说明列矩阵记号。
$F$ 右侧的下标分别表示节点编号和力的方向。例如,$F _ { 1 x }$ 表示作用在节点 1、方向为 $x$ 的力。一个节点在 $x,y,z$ 方向上的位移通常分别记为 $u,\nu,w$;它们右侧的下标表示节点编号。例如,$u_1,\nu_1,w_1$ 表示节点 1 在 $x,y,z$ 方向上的位移分量。式 (1.2.1) 中的矩阵称为列矩阵,尺寸为 $n \times 1$。本书用花括号 {} 表示列矩阵,整个力或位移列矩阵则简写为 $\{F\}$ 或 $\{d\}$。
更一般的已知矩形矩阵用方括号 [] 表示。例如,本书后续为不同单元类型建立的单元刚度矩阵 $[k]$ 和整体结构刚度矩阵 $[K]$ 可表示为方阵:
以及
在结构理论中,元素 $k_{ij}$ 和 $K_{ij}$ 通常称为刚度影响系数。
整体节点力 $\{F\}$ 与整体节点位移 $\{d\}$ 通过整体刚度矩阵 $[K]$ 相关:
式 (1.2.4) 称为整体刚度方程,表示一组联立方程。它是刚度法或位移法分析中的基本方程。
为更清楚地理解式 (1.2.3) 中 $K_{ij}$ 的意义,可将式 (1.2.4) 展开为:
假设结构被强制变形到如下位移状态:$u_1=1$,而 $\nu_1=w_1=\cdots=w_n=0$。由式 (1.2.5) 可得:
式 (1.2.6) 给出了 $[K]$ 第一列的所有元素,并说明这些元素就是维持给定位移状态所需的一组节点力。类似地,$[K]$ 第二列表示维持 $\nu_1=1$ 且其他节点位移分量均为零时所需的力。由此可以更直观地理解刚度影响系数的物理意义。
后续章节将讨论各种单元类型的单元刚度矩阵 $[k]$,例如杆、梁、平面应力单元和三维应力单元;也会说明如何为不同结构得到整体刚度矩阵 $[K]$,并求解式 (1.2.4) 中的未知位移 $\{d\}$。
通过练习,矩阵概念和运算会变得很自然。它们不仅是手算小问题的有用工具,也是利用数字计算机求解大型复杂问题的基础。
1.3 计算机的作用
如前所述,直到 20 世纪 50 年代初,矩阵方法及相关的有限元法还不容易用于求解复杂问题。虽然有限元法已经被用于描述复杂结构,但结构有限元分析会产生大量代数方程,这使得该方法非常困难且不实用。计算机出现以后,几分钟内求解成千上万个方程成为可能。
最早的现代商用计算机之一似乎是 20 世纪 50 年代开发的 UNIVAC 和 IBM 701,它们基于真空管技术。
UNIVAC 时代还伴随着穿孔卡片技术,程序和数据都写在穿孔卡片上。20 世纪 60 年代,由于晶体管成本更低、重量更小、功耗更低且可靠性更高,晶体管技术取代了真空管技术。1969 年至 20 世纪 70 年代后期,集成电路技术逐渐发展,大幅提升了计算机处理速度,使更大规模、更高自由度的有限元问题得以求解。20 世纪 70 年代后期至 80 年代,大规模集成电路、工作站、窗口式图形界面和鼠标相继出现。第一只计算机鼠标于 1970 年 11 月 17 日获得专利。个人计算机逐渐成为大众化桌面计算机。这些发展发生在网络计算时代,并带来了互联网和万维网。20 世纪 90 年代,Windows 操作系统发布,通过将图形用户界面集成到软件中,使 IBM 及兼容 PC 更易于使用。
计算机的发展促进了计算程序的编写。大量专用程序和通用程序被开发出来,用于处理各种复杂的结构和非结构问题。相关程序展示了有限元法的优雅性,并有助于加深对该方法的理解。
事实上,有限元程序现在既可以在单处理器机器上运行,例如台式机或笔记本电脑,也可以在计算节点集群上运行。个人计算机内存能力和求解器程序的进步,使得求解超过一百万个未知量的问题成为可能。
使用计算机时,分析人员首先定义有限元模型,然后将信息输入计算机。这些信息可能包括单元节点坐标位置、单元连接方式、单元材料性质、外加载荷、边界条件或约束,以及要执行的分析类型。计算机随后利用这些信息生成并求解分析所需的方程。
1.4 有限元法的一般步骤
本节介绍用有限元法建立和求解工程问题时通常包含的一般步骤。后续章节中,无论是结构问题还是非结构问题,我们都将以这些步骤作为求解思路。
为简化说明,这里只考虑结构问题。非结构的热传导、流体力学和静电问题,以及它们与结构问题的类比,将在第 13 章和第 14 章中讨论。
对于结构应力分析问题,工程师通常希望确定受载平衡结构中的位移和应力分布。对许多结构而言,用传统方法求出变形分布非常困难,因此需要使用有限元法。
推导物理系统有限元方程主要有三类方法:1. 直接法或结构分析中的直接平衡法;2. 变分法,包括能量法和虚功原理;3. 加权余量法。下面先简要说明这三类方法,随后在步骤 4 中进一步讨论。
直接法
直接法最简单,并能清楚展示有限元法的物理含义,因此适合在学习有限元基本概念的初期使用。不过,直接法主要限于推导一维单元的刚度矩阵,例如弹簧、轴向杆、桁架和梁。
在结构力学问题中,传统上有两类与有限元法有关的直接方法。第一类称为力法或柔度法,以内力作为问题未知量。建立控制方程时,首先使用平衡方程,再通过引入协调方程得到必要的附加方程,最终形成用于求解多余力或未知力的一组代数方程。
第二类称为位移法或刚度法,以节点位移作为问题未知量。例如,加载前在公共节点、公共边或公共面上相连的单元,在变形后仍应保持连接,这类协调条件在一开始就得到满足。随后,利用平衡方程和适用的力-位移关系,将控制方程表示为节点位移的函数。
这两种直接方法在分析中的未知量不同(力或位移),对应的矩阵也不同(柔度矩阵或刚度矩阵)。已有研究表明,从计算角度看,位移法或刚度法更适合大多数结构分析问题,因为其公式更简单。此外,绝大多数通用有限元程序都采用位移形式求解结构问题。因此,本书将只采用位移法。
变分法
对于二维和三维单元,使用变分法推导有限元方程通常比直接法容易得多。不过,变分法要求存在一个泛函;对该泛函取最小值后,可以得到刚度矩阵及相关单元方程。对于结构或应力分析问题,可以使用最小势能原理作为泛函。该原理是一个较容易理解的物理概念,读者很可能已在基础应用力学课程中接触过。
变分法既可用于发展结构问题的控制方程,也可用于非结构问题。变分法包含若干原理。本书大量使用其中的最小势能定理,因为它较容易理解,而且通常在基础力学课程中出现。该定理适用于线弹性材料。本书将在多个位置解释并使用它,例如第 2.6 节中的弹簧单元、第 3.10 节中的杆单元、第 4.7 节中的梁单元、第 6.2 节中的常应变三角形平面应力/平面应变单元、第 9.1 节中的轴对称单元、第 11.2 节中的三维四面体实体单元以及第 12.2 节中的板弯曲单元。对于第 13 章中的非结构热传导问题,则会使用与最小势能定理中泛函类似的泛函来建立有限元方程。
另一个常用于推导控制方程的变分原理是虚功原理。它不仅适用于线弹性材料,也更一般地适用于非线性材料。附录 E 介绍了虚功原理,供希望用它建立一般有限元控制方程的读者参考。这些方程可用于杆、梁以及二维和三维实体的静力或动力系统。
加权余量法
加权余量法允许在不需要变分原理存在的情况下,将有限元法直接应用于任意微分方程。第 3.12 节引入 Galerkin 法,这是一种非常著名的余量法,用于推导杆单元刚度矩阵及其单元方程。第 3.13 节还介绍了其他余量法,用于求解杆轴向位移的控制微分方程。
有限元法用相互连接的小单元,即有限单元,来模拟结构。每个有限单元都配有一个位移函数。所有相连单元通过公共界面直接或间接联系起来,这些界面包括节点、边界线或边界面。利用结构材料已知的应力-应变性质,可以将某个节点的行为同结构中其他单元的性质联系起来。描述各节点行为的全部方程形成一组代数方程,最适合用矩阵记号表示。
下面给出结构问题有限元建模和求解的一般步骤。现在提出这些步骤,是为了让你先熟悉有限元公式化问题时通常遵循的过程。后续章节在弹簧、杆、桁架、梁、平面框架、平面应力、轴对称应力、三维应力、板弯曲、热传导、流体流动和静电问题中具体推导单元方程时,这些步骤会变得更容易理解。建议你在学习各类具体单元方程时,定期回顾本节。
需要注意的是,分析人员必须作出若干决策,例如如何将结构或连续体划分为有限单元、选择何种单元类型进行分析(步骤 1)、施加何种载荷、采用何种边界条件或支承。其余步骤 2 至 7 通常由计算机程序自动完成。
步骤 1 离散化并选择单元类型
步骤 1 是将物体划分为由节点连接的有限单元系统,并选择最能近似实际物理行为的单元类型。对于给定物体,单元总数以及单元尺寸和类型的变化主要依赖工程判断。单元必须足够小,以便得到可用结果;同时也要足够大,以降低计算量。在结果变化剧烈的位置,例如几何突变处,通常希望使用较小单元,必要时可使用高阶单元;在结果变化相对平缓的位置,可以使用较大单元。后续章节,特别是第 7 章,会进一步讨论离散化准则。
离散化后的物体或网格通常由网格生成程序或前处理程序生成。
有限元分析中单元的选择取决于物体在实际载荷条件下的物理构成,也取决于分析人员希望结果接近真实行为的程度。分析人员需要判断采用一维、二维还是三维理想化模型更合适。为特定问题选择最合适的单元,是设计者或分析人员必须完成的主要任务之一。实践中常用的单元类型如图 1-2 所示,本书也会讨论其中大多数。
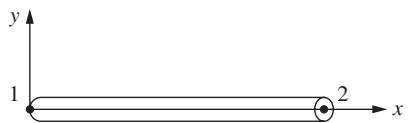
主要的一维线单元包括杆单元或桁架单元以及梁单元。它们具有横截面积,但通常用线段表示。一般而言,单元内横截面积可以变化,但本书中通常假定为常数。这类单元常用于模拟桁架和框架结构。最简单的线单元称为线性单元,具有两个节点,分别位于两端;也存在具有三个或更多节点的高阶单元,如二次、三次单元等。第 10 章会讨论高阶线单元。线单元是最简单的单元类型,本书第 2 章至第 5 章将用它们说明有限元法的许多基本概念。
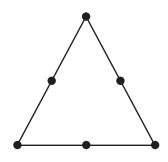
基本二维或平面单元在其自身平面内受力,适用于平面应力或平面应变条件。它们可以是三角形单元或四边形单元。最简单的二维单元只有角节点(线性单元)和直边界;也存在通常带有边中节点的高阶单元(二次单元)以及曲边单元。单元厚度可以变化,也可以为常数。这类单元常用于模拟范围广泛的工程问题。
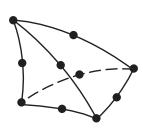
最常见的三维单元是四面体单元和六面体或砖块单元;当需要进行三维应力分析时会使用它们。基本三维单元只有角节点和直边,高阶单元则带有边中节点,甚至可能带有面中节点,并具有曲面边界。
轴对称单元由一个三角形或四边形绕位于单元平面内的一条固定轴旋转 360 度而成。当问题的几何和载荷关于某轴对称时,可以使用这种单元。轴对称单元将在第 9 章讨论。
步骤 2 选择位移函数
步骤 2 是在每个单元内选择一个位移函数。该函数用单元节点值在单元内部定义。线性、二次和三次多项式因便于有限元公式推导而经常使用;三角函数级数也可以使用。对于二维单元,位移函数是其平面坐标(例如 $x-y$ 平面)上的函数,并用节点未知量表示。

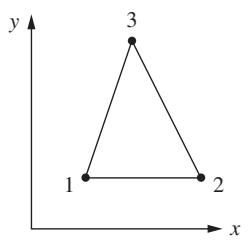
三角形单元
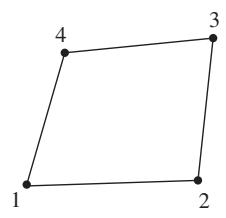
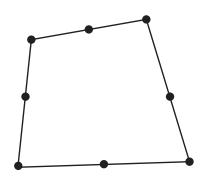
四边形单元
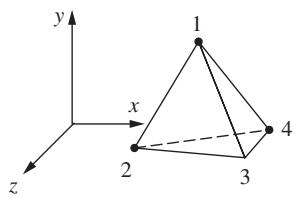
四面体单元
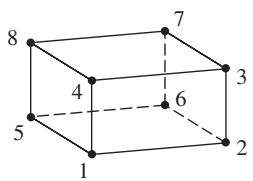
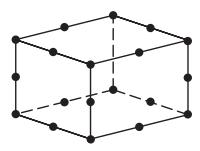
规则六面体
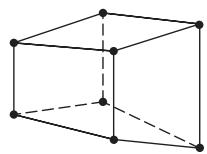
非规则六面体
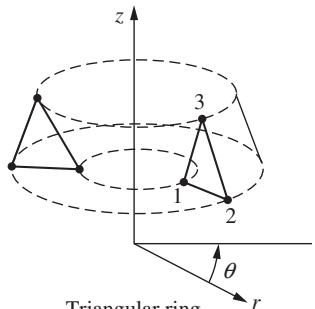
三角环形单元
四边环形单元
图 1-2 各种低阶有限单元以及带中间节点的高阶有限单元示意。
同一种通用位移函数可以在各个单元中重复使用。因此,有限元法可理解为:用定义在各个有限域或有限单元内的一组分片连续函数,来近似连续体中的连续量,例如整个位移场。
对于一维弹簧和杆单元,位移函数只是一维坐标(例如沿弹簧或杆轴线的 $x$)的函数。对弹簧和杆单元而言,可以跳过步骤 2,直接进入步骤 3 推导单元刚度矩阵和方程。第 2 章和第 3 章将分别对弹簧和杆作明确说明。
步骤 3 定义应变-位移关系和应力-应变关系
推导每个有限单元的方程时,需要用到应变-位移关系和应力-应变关系。以 $x$ 方向的一维变形为例,小应变条件下,应变 $\varepsilon_x$ 与位移 $u$ 的关系为:
此外,应力必须通过应力-应变定律与应变相关联,这通常称为本构关系。准确描述材料行为对于获得可接受结果非常重要。应力分析中常用的最简单应力-应变定律是 Hooke 定律:
其中,$\sigma_x$ 为 $x$ 方向应力,$E$ 为弹性模量。
步骤 4 推导单元刚度矩阵和单元方程
最初,单元刚度矩阵和单元方程的发展基于刚度影响系数的概念,这要求读者具备结构分析背景。下面介绍本书使用的几种替代方法,它们不需要这种专门背景。
# 直接平衡法
按照该方法,利用基本单元的力平衡条件以及力-变形关系,可以得到联系节点力和节点位移的刚度矩阵与单元方程。由于这种方法最容易用于线单元或一维单元,第 2、3、4 章将分别用弹簧、杆和梁单元说明这一方法。
# 功或能量法
对于二维和三维单元,使用功或能量法推导刚度矩阵和方程通常容易得多。虚功原理、最小势能原理以及 Castigliano 定理都是常用于推导单元方程的方法。
虚功原理适用于任意材料行为,而最小势能原理和 Castigliano 定理只适用于弹性材料。此外,即使不存在势函数,也可以使用虚功原理。对于线弹性材料,这三种原理会得到相同的单元方程。因此,在结构分析中使用哪一种方法,主要取决于方便性和个人偏好。本书将在第 2 章和第 3 章详细介绍最小势能原理,并用它推导弹簧和杆单元方程;之后会将该原理推广到第 4 章的梁单元和第 6 章的平面应力/应变单元。再往后,第 8、9、11、12 章中其他应力分析刚度矩阵和单元方程的推导,也会以该原理为基础。
为将有限元法推广到结构应力分析之外的领域,类似于最小势能原理中泛函的量在推导单元刚度矩阵和方程时非常有用。第 13 章和第 14 章分别会在热传导和流体流动问题中用到这类思想。若用 $\pi$ 表示泛函,用 $f(x,y)$ 表示两个变量 $x,y$ 的函数,则有 $\pi=\pi(f(x,y))$,即 $\pi$ 是函数 $f$ 的函数。依赖于两个独立变量 $u(x,y)$ 和 $\nu(x,y)$ 的更一般泛函可写为:
其中,逗号后的下标 $x$ 和 $y$ 表示对 $x$ 或 $y$ 求导,例如 $u,_x=\partial u/\partial x$ 等。
# 加权余量法
加权余量法也可用于建立单元方程,其中 Galerkin 法尤其常用。当能量法适用时,加权余量法会给出相同结果;当势能这类泛函不容易得到时,它尤其有用。加权余量法允许有限元法直接应用于任意微分方程。
第 3 章将介绍 Galerkin 法、配点法、最小二乘法和子域法。为说明这些方法,本书将用它们求解一个具有已知精确解的一维杆问题,并进行比较。Galerkin 法作为较易适配的余量法,还将用于第 3 章推导杆单元方程、第 4 章推导梁单元方程,以及第 13 章求解热传导/对流/质量传输耦合问题。关于加权余量法的更多内容,可参阅参考文献 [36];其在有限元法中的更多应用可参阅 [37] 和 [38]。
以上任一方法都可以生成描述单元行为的方程。这些方程通常方便地写成矩阵形式:
或简写为:
其中,$\{f\}$ 是单元节点力向量,$[k]$ 是单元刚度矩阵(通常为方阵且对称),$\{d\}$ 是单元节点自由度或广义位移向量。这里的广义位移可以包括实际位移、转角,甚至曲率等量。后续章节将针对图 1-2 所示的具体单元类型详细建立和解释式 (1.4.5) 中的矩阵。
步骤 5 装配单元方程以得到整体方程,并引入边界条件
在这一步中,步骤 4 得到的各单元节点平衡方程被装配为整体节点平衡方程。第 2.3 节将用两个弹簧组成的系统说明这一概念。另一种更直接的叠加方法称为直接刚度法,其基础是节点力平衡,可用于得到整个结构的整体方程。第 2.4 节将用弹簧系统说明这一方法。直接刚度法隐含了连续性或协调性的概念,即结构必须保持整体连接,内部不能出现撕裂。
最终装配得到的整体方程可写为:
其中,$\{F\}$ 是整体节点力向量,$[K]$ 是结构整体刚度矩阵或总刚度矩阵(在多数问题中为方阵且对称),$\{d\}$ 则是结构节点自由度或广义位移向量,其中包含已知和未知量。可以证明,在这一阶段,整体刚度矩阵 $[K]$ 是奇异矩阵,因为其行列式为零。为消除奇异性,必须施加某些边界条件、约束或支承,使结构不再作为刚体整体运动。边界条件的施加方法将在后续章节详细讨论。此处只需注意,施加边界或支承条件会修改整体方程 (1.4.6)。同时,已知外载荷已经计入整体力矩阵 $\{F\}$。
步骤 6 求解未知自由度或广义位移
将边界条件计入后,式 (1.4.6) 成为一组联立代数方程,可展开写为:
这里的 $n$ 是结构中未知节点自由度的总数。可用消元法(例如 Gauss 法)或迭代法(例如 Gauss-Seidel 法)求解这些方程。两类方法在附录 B 中讨论。位移 $d$ 称为主未知量,因为它们是采用刚度法或位移型有限元法首先求出的量。
步骤 7 求解单元应变和应力
对于结构应力分析问题,求得步骤 6 中的位移后,可以进一步得到重要的次要量,例如应变和应力,或弯矩与剪力。这些量通常可以直接表示为位移的函数。可使用步骤 3 中给出的一维应力情形下的应变-位移关系和应力-应变关系,例如式 (1.4.1) 和式 (1.4.2)。
步骤 8 解释结果
最后的目标是在设计或分析过程中解释和分析结果。确定结构中大变形和高应力出现的位置,通常对设计和分析决策很重要。后处理程序可以用图形方式显示结果,帮助用户理解分析结果。
1.5 有限元法的应用
有限元法可用于分析结构问题和非结构问题。典型结构领域包括:
- 应力分析,包括桁架和框架分析(如人行桥、高层建筑框架、风力机塔架),以及通常与孔洞、圆角或其他几何突变相关的应力集中问题(如汽车零件、压力容器、医疗器械、飞机和运动器材)。
- 屈曲分析,例如柱、框架和容器的屈曲。
- 振动分析,例如振动设备的分析。
- 冲击问题,包括车辆碰撞分析、弹丸冲击以及物体坠落撞击。
非结构问题包括
- 热传导,例如个人电脑微处理器芯片、发动机、散热器翅片等发热电子或机械部件。
- 流体流动,包括多孔介质渗流(例如水通过土坝渗流)、冷却池、体育场馆通风系统中的空气流动,以及赛车、帆船和冲浪板周围的流动。
- 电势或磁势分布,例如天线和晶体管中的势场。
此外,一些生物力学工程问题也经常使用有限元法,其中可能包括应力分析,例如人体脊柱、颅骨、髋关节、牙种植体、心脏和眼睛的分析。
下面给出若干有限元法的典型应用。这些例子说明了有限元法能够求解问题的多样性、规模和复杂性,也展示了典型的离散化过程和所用单元类型。
图 1-3 展示了一座铁路控制塔。该塔是由一系列梁单元组成的三维框架。图中带圈数字表示 48 个单元,不带圈数字表示 28 个节点。每个节点具有 3 个转动分量和 3 个位移分量,这些转角和位移称为自由度。由于塔架所受载荷条件,需要采用三维模型。
对该框架使用有限元法,可以使设计者或分析人员快速获得设计规范所要求的典型载荷工况下塔架的位移和应力。在有限元法和计算机发展之前,即使这样相对简单的问题也需要许多小时才能求解。
下一个例子是地下箱涵在炸弹爆炸引起的地冲击载荷下的位移和应力分析。图 1-4 给出了离散模型,其中包含 369 个节点、40 个一维杆或桁架单元(用于模拟箱涵中的钢筋)以及 333 个平面应变二维三角形和矩形单元(用于模拟周围土体和混凝土箱涵)。由于采用了对称假设,只需要分析箱涵的一半。该问题需要求解近 700 个未知节点位移,也说明一个有限元模型中可以同时使用不同类型的单元,例如杆单元和平面应变单元。
另一个问题是图 1-5 所示的液压缸杆端分析,该模型包含 120 个节点和 297 个平面应变三角形单元。同样利用对称性,只需分析整个杆端的一半。该分析的目的是确定杆端的高应力集中区域。
图 1-6 给出一个高度为四个模板段、总高 9.75 m 的烟囱模板段模型。在该模型中,584 个梁单元用于模拟构成模板的竖向和横向加劲件,252 个平板单元用于模拟内侧木模和混凝土壳体。由于结构上载荷分布不规则,需要采用三维模型。本问题主要关注混凝土中的位移和应力。
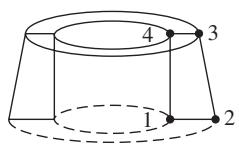
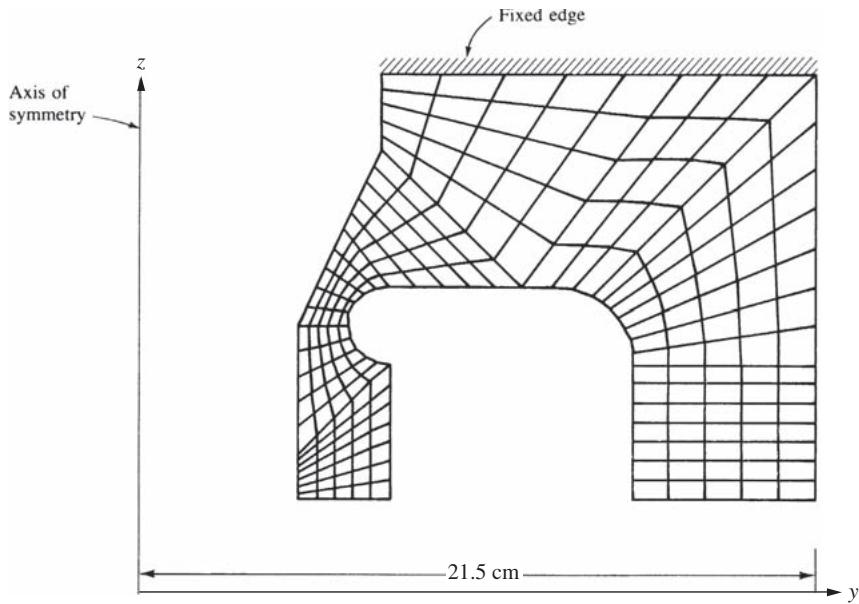
图 1-7 给出了塑料薄膜制造过程中拟采用钢模的有限元离散模型。由于几何形状不规则且可能出现应力集中,需要用有限元法获得合理解。该三维模具用 240 个轴对称单元模拟。
图 1-8 展示了用三维实体单元模拟反铲装载机框架摆动铸件的例子。由于该铸件是形状不规则的三维实体,必须使用三维六面体单元进行建模;二维模型显然无法给出足够准确的工程解。
图 1-9 是一个二维热传导模型,用于确定埋地热气管道这一热源作用下土体中的温度分布。
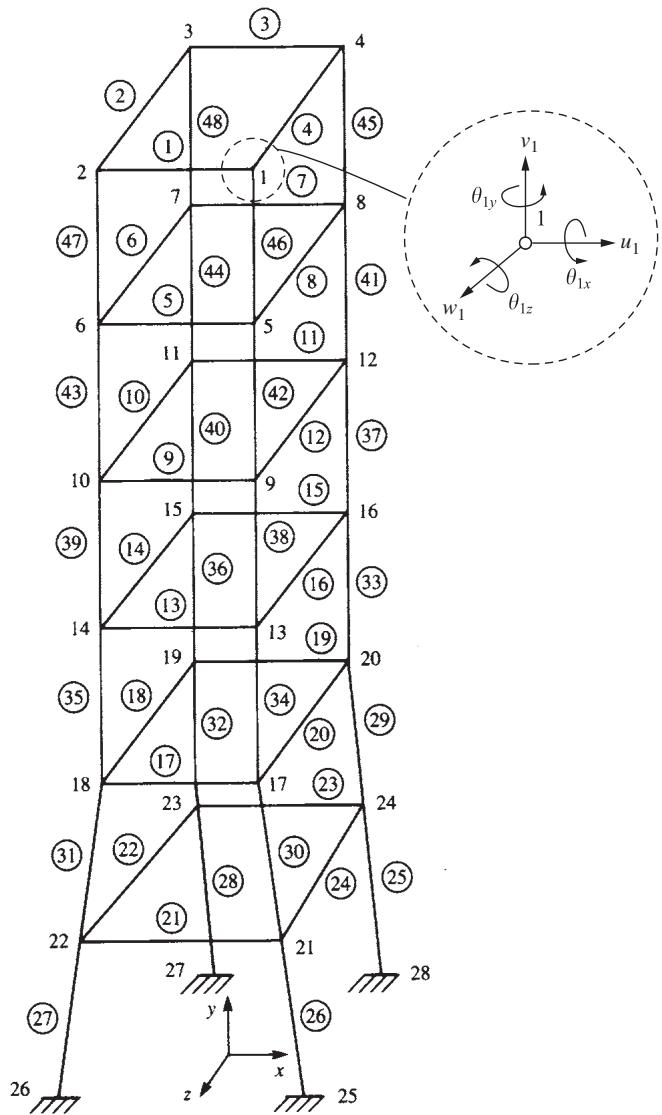
图 1-3 离散化铁路控制塔,含 28 个节点和 48 个梁单元;以节点 1 为例示出典型自由度。
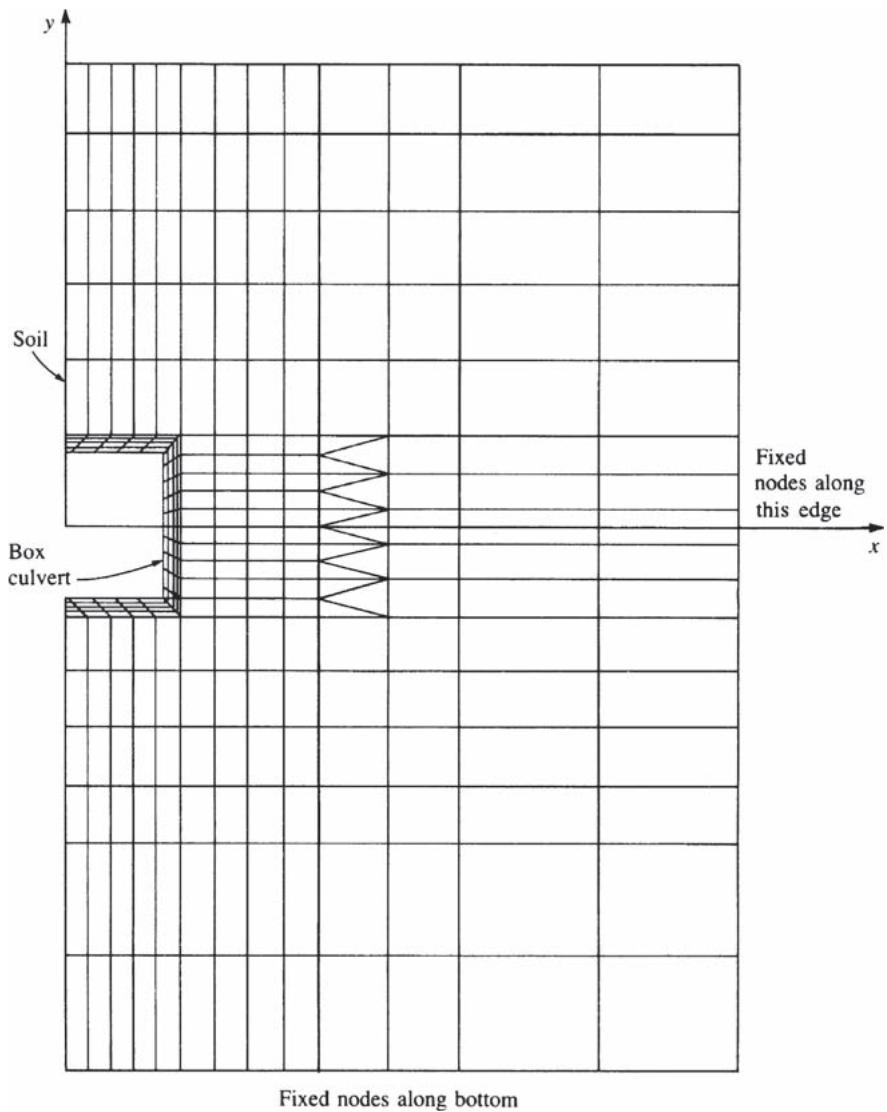
图 1-4 地下箱涵离散模型,含 369 个节点、40 个杆单元和 333 个平面应变单元。
图 1-10 显示了人体骨盆的三维模型,可用于研究骨组织以及骨与植入体之间骨水泥层中的应力。
图 1-11 显示了 710G 铲斗的三维模型,用于研究铲斗中的应力分布。
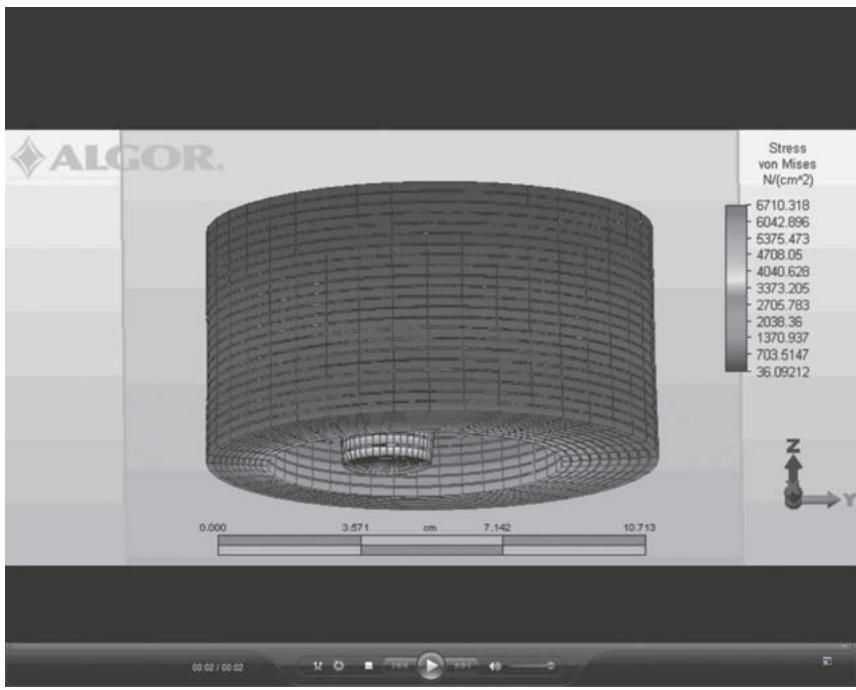
近年来,包含非线性行为和接触的机械事件仿真(MES)也开始使用有限元分析,例如图 1-12 所示的辊压成形过程。另外,在叶片旋转并受到风、冰和地震等载荷条件作用时,也可对风力发电机进行应力分析,如图 1-13 所示。
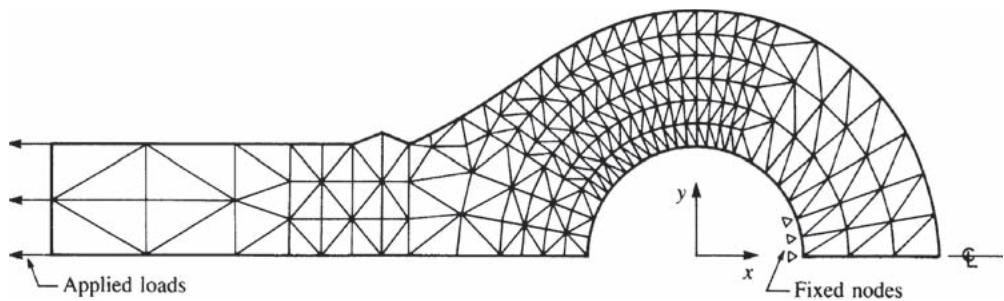
图 1-5 液压缸杆端的二维分析模型,含 120 个节点和 297 个平面应变三角形单元。
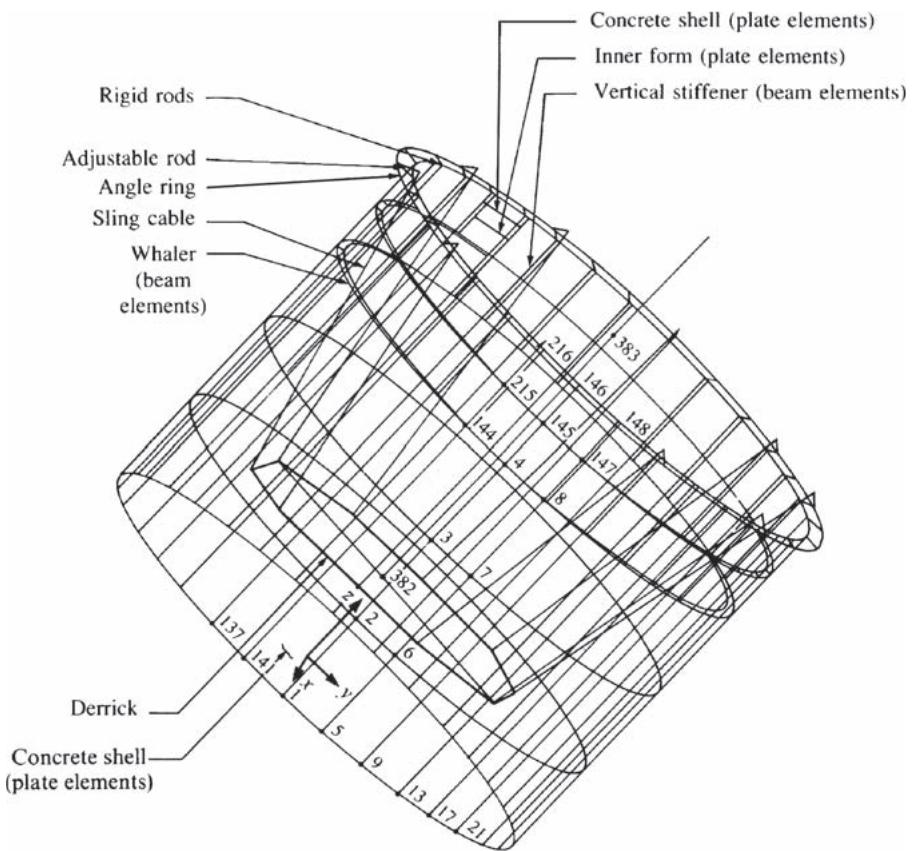
图 1-6 烟囱模板段有限元模型(端视图旋转显示),含 584 个梁单元和 252 个平板单元。
(a)
(b) 图 1-7 (a) 塑料薄膜工业用高强钢模模型,含 240 个轴对称单元;(b) 将平面内单元绕 $z$ 轴旋转 360 度得到的三维可视化结果。
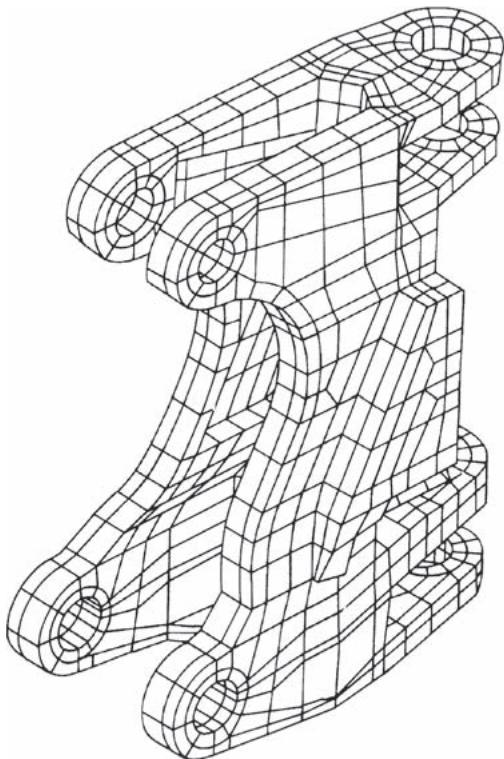
图 1-8 反铲装载机框架摆动铸件的三维实体单元模型。
最后,基于有限元分析的计算流体力学(CFD)近年来也被用于大型体育场馆通风系统设计,以及研究赛车周围气流、被高尔夫球杆击打后高尔夫球周围气流等问题。
这些例子说明了有限元法可以求解的各种问题。关于建模技术的更多准则将在第 7 章给出。
1.6 有限元法的优点
如前所述,有限元法已应用于大量结构和非结构问题。相对于材料力学和热传导等传统课程中介绍的常规近似方法,有限元法在建模以及求解位移、应力、温度、压力和电流等物理量方面具有许多优点,因此被广泛采用。它能够:
- 较容易地模拟不规则形状的物体。
- 方便地处理一般载荷条件。
- 模拟由多种不同材料组成的物体,因为单元方程可分别计算。
- 处理数量和类型几乎不受限制的边界条件。
- 改变单元尺寸,从而在必要位置使用小单元。
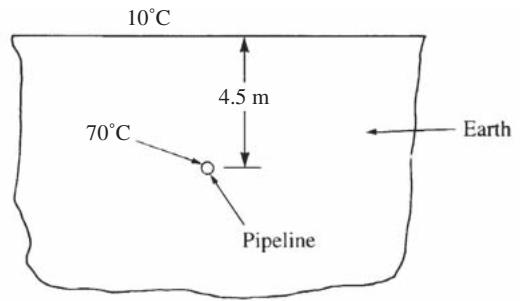
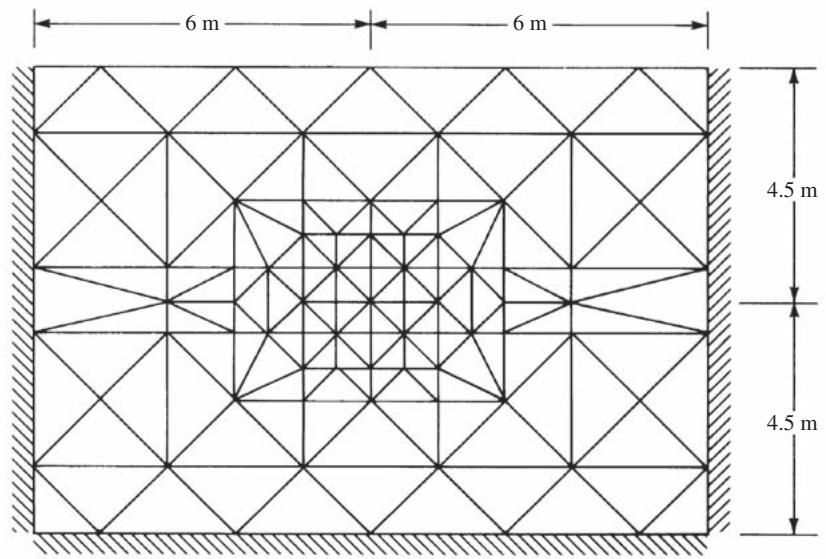
图 1-9 土体中二维温度分布的有限元模型。
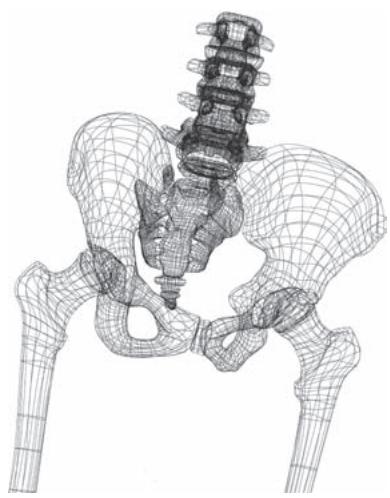
图 1-10 人体骨盆有限元模型。
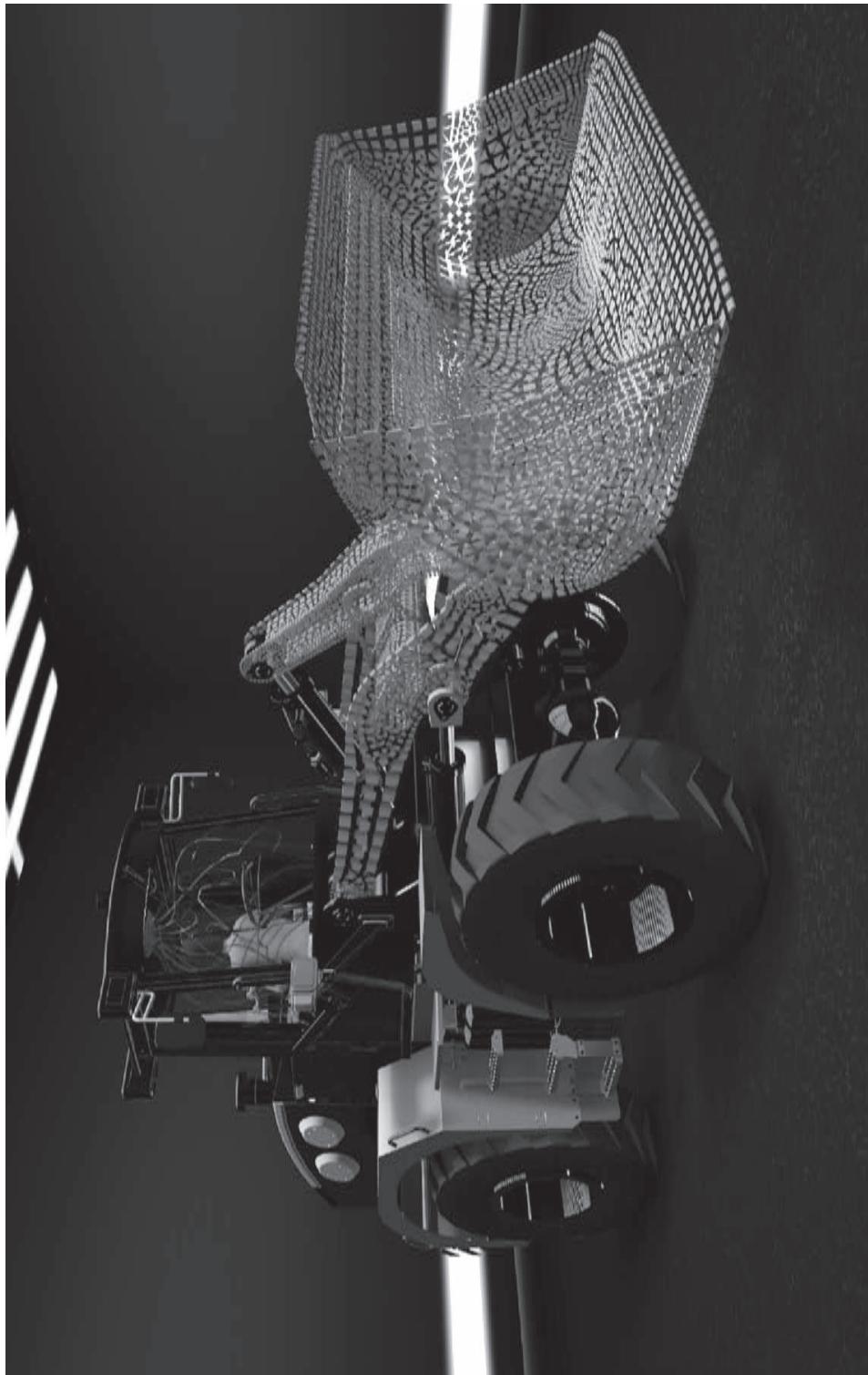
图 1-11 铲斗有限元模型。原始 OCR 图题不完整。
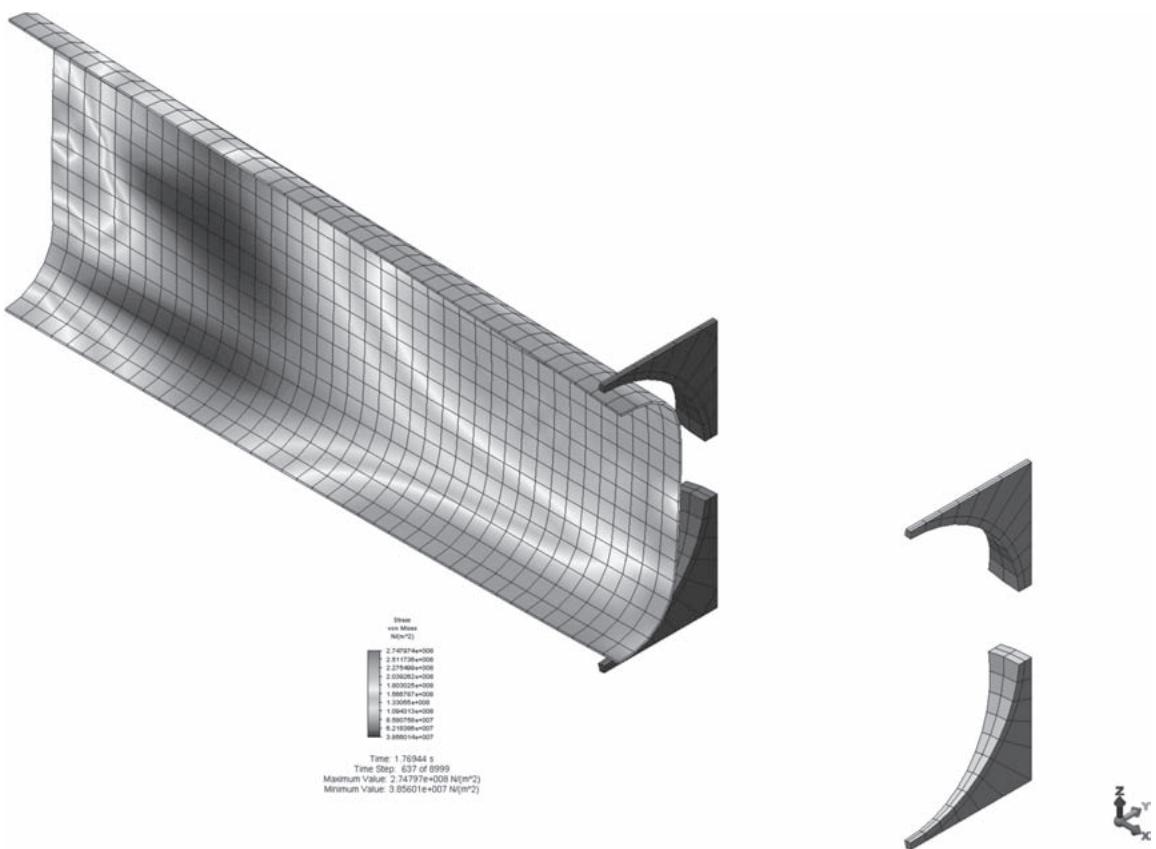
图 1-12 轮廓辊压成形或冷辊压成形过程的有限元模型。
- 相对容易且低成本地修改有限元模型。
- 考虑动力效应。
- 处理由大变形和非线性材料引起的非线性行为。
结构有限元分析使设计者能够在设计阶段发现应力、振动和热问题,并在制造可能的样机之前评估设计修改。因此,它可以提高人们对样机可接受性的信心。如果使用得当,该方法还能减少需要制造的样机数量。
尽管有限元法最初用于结构分析,但后来已扩展到工程和数学物理的许多其他学科,例如流体流动、热传导、电磁势、土力学和声学。
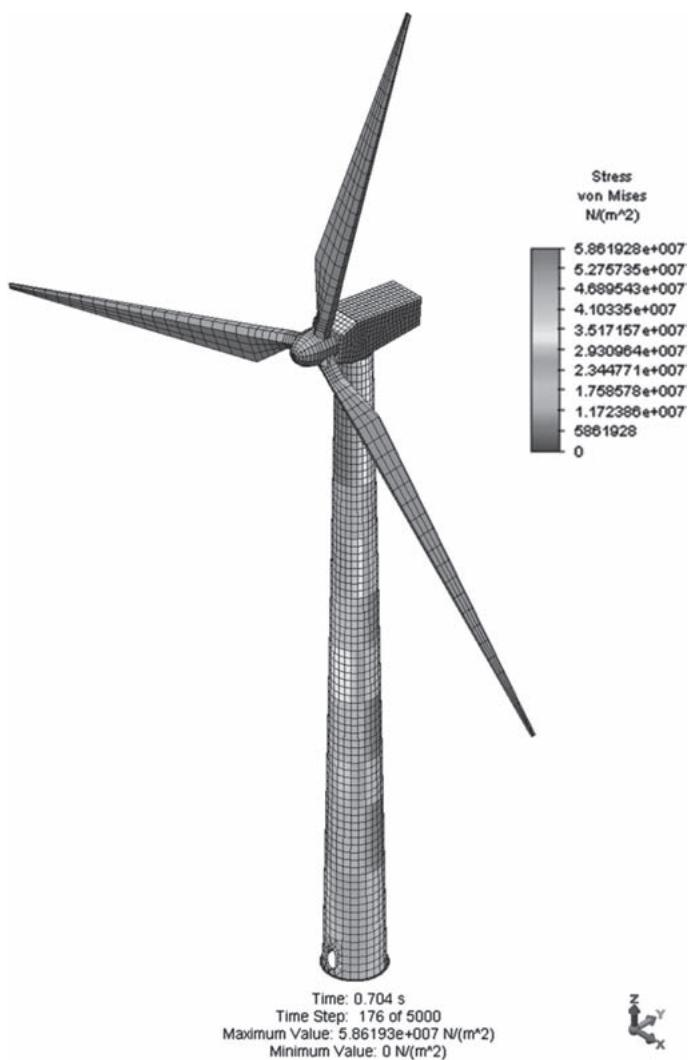
图 1-13 非线性有限元仿真中,风力机塔架在关键时间步的 von Mises 应力云图。
1.7 有限元计算程序
用有限元法求解问题时,计算程序大体有两类使用方式。一类是使用大型商业软件,其中许多已经配置为可在个人计算机上运行;这类通用程序可求解多种类型的问题。另一类是开发许多小型专用程序,用于求解特定问题。本节将讨论两类方法的优缺点,并列出一些可用的通用程序及其标准功能。
通用程序的一些优点包括:
- 输入组织良好,并以方便用户为目标。用户不需要具备特殊的软件或硬件知识。前处理程序通常可帮助建立有限元模型。
- 这类程序通常是大型系统,能够用相同输入格式求解多种大小和类型的问题。
- 许多程序可以通过增加新模块来处理新问题或新技术,因此只需较少工作即可保持更新。
- 随着个人计算机存储能力和计算效率的提高,许多通用程序现在可在 PC 上运行。
- 许多商业程序价格已更具吸引力,并能求解广泛的问题。
通用程序的一些缺点包括:
- 开发通用程序的初始成本很高。
- 通用程序通常不如专用程序高效,因为计算机必须对每个问题执行许多检查,其中有些检查在专用程序中并不需要。
- 许多程序是专有软件,因此用户很难了解程序逻辑。如果需要修改,通常必须由开发者完成。
专用程序的一些优点包括:
- 程序通常较短,开发成本较低。
- 小型计算机即可运行。
- 可以快速、低成本地增加功能。
- 对其设计目标问题而言,求解效率较高。
专用程序的主要缺点是无法求解不同类别的问题。因此,若有多少类问题,就需要多少个相应程序。参考网站 [60] 给出了一些公有领域专用有限元程序。
支持有限元程序的厂商很多,有意购买软件的用户应仔细咨询厂商。为了让读者了解目前可用于个人计算机有限元求解的商业程序,下面列出部分现有程序:
- Autodesk Simulation Multiphysics
- Abaqus
- ANSYS
- COSMOS/M
- GT-STRUDL
- LS-DYNA
- MARC
- MSC/NASTRAN
- NISA
- Pro/MECHANICA
- SAP2000
- STARDYNE
许多上述程序的标准功能可在相关参考资料中找到。这些功能包括:
- 可用单元类型,例如梁、平面应力单元和三维实体单元。
- 可用分析类型,例如静力分析和动力分析。
- 材料行为,例如线弹性和非线性行为。
- 载荷类型,例如集中载荷、分布载荷、热载荷和位移载荷(沉降)。
- 数据生成,例如节点、单元和约束的自动生成;多数程序带有用于生成模型网格的前处理器。
- 图形绘制,例如原始几何、变形后几何、应力云图和温度云图;多数程序带有后处理器,帮助以图形方式解释结果。
- 位移行为,例如小位移、大位移和屈曲。
- 选择性输出,例如选定节点、选定单元以及最大值或最小值。
所有程序至少包含杆、梁、平面应力、板弯曲和三维实体单元,大多数程序现在还包含热传导分析能力。
程序的完整功能和价格最好通过程序参考手册和官方网站获得。
参考文献
参考文献条目为准确起见主要保留原文书目信息,仅将标题区保持 Markdown 排版。
[1] Hrennikoff, A., “Solution of Problems in Elasticity by the Frame Work Method,” Journal of Applied Mechanics, Vol. 8, No. 4, pp. 169-175, Dec. 1941.
[2] McHenry, D., “A Lattice Analogy for the Solution of Plane Stress Problems,” Journal of Institution of Civil Engineers, Vol. 21, pp. 59-82, Dec. 1943.
[3] Courant, R., “Variational Methods for the Solution of Problems of Equilibrium and Vibrations,” Bulletin of the American Mathematical Society, Vol. 49, pp. 1-23, 1943.
[4] Levy, S., “Computation of Influence Coefficients for Aircraft Structures with Discontinuities and Sweepback,” Journal of Aeronautical Sciences, Vol. 14, No. 10, pp. 574-560, Oct. 1947.
[5] Levy, S., “Structural Analysis and Influence Coefficients for Delta Wings,” Journal of Aeronautical Sciences, Vol. 20, No. 7, pp. 449-454, July 1953.
[6] Argyris, J. H., “Energy Theorems and Structural Analysis,” Aircraft Engineering, Oct., Nov., Dec. 1954 and Feb., Mar., Apr., May 1955.
[7] Argyris, J. H., and Kelsey, S., Energy Theorems and Structural Analysis, Butterworths, London, 1960.
[8] Turner, M. J., Clough, R. W., Martin, H. C., and Topp, L. J., “Stiffness and Deflection Analysis of Complex Structures,” Journal of Aeronautical Sciences, Vol. 23, No. 9, pp. 805-824, Sept. 1956.
[9] Clough, R. W., “The Finite Element Method in Plane Stress Analysis,” Proceedings, American Society of Civil Engineers, 2nd Conference on Electronic Computation, Pittsburgh, PA, pp. 345-378, Sept. 1960.
[10] Melosh, R. J., “A Stiffness Matrix for the Analysis of Thin Plates in Bending,” Journal of the Aerospace Sciences, Vol. 28, No. 1, pp. 34-42, Jan. 1961.
[11] Grafton, P. E., and Strome, D. R., “Analysis of Axisymmetric Shells by the Direct Stiffness Method,” Journal of the American Institute of Aeronautics and Astronautics, Vol. 1, No. 10, pp. 2342-2347, 1963.
[12] Martin, H. C., “Plane Elasticity Problems and the Direct Stiffness Method,” The Trend in Engineering, Vol. 13, pp. 5-19, Jan. 1961.
[13] Gallagher, R. H., Padlog, J., and Bijlaard, P. P., “Stress Analysis of Heated Complex Shapes,” Journal of the American Rocket Society, Vol. 32, pp. 700-707, May 1962.
[14] Melosh, R. J., “Structural Analysis of Solids,” Journal of the Structural Division, Proceedings of the American Society of Civil Engineers, pp. 205-223, Aug. 1963.
[15] Argyris, J. H., “Recent Advances in Matrix Methods of Structural Analysis,” Progress in Aeronautical Science, Vol. 4, Pergamon Press, New York, 1964.
[16] Clough, R. W., and Rashid, Y., “Finite Element Analysis of Axisymmetric Solids,” Journal of the Engineering Mechanics Division, Proceedings of the American Society of Civil Engineers, Vol. 91, pp. 71-85, Feb. 1965.
[17] Wilson, E. L., “Structural Analysis of Axisymmetric Solids,” Journal of the American Institute of Aeronautics and Astronautics, Vol. 3, No. 12, pp. 2269-2274, Dec. 1965.
[18] Turner, M. J., Dill, E. H., Martin, H. C., and Melosh, R. J., “Large Deflections of Structures Subjected to Heating and External Loads,” Journal of Aeronautical Sciences, Vol. 27, No. 2, pp. 97-107, Feb. 1960.
[19] Gallagher, R. H., and Padlog, J., “Discrete Element Approach to Structural Stability Analysis,” Journal of the American Institute of Aeronautics and Astronautics, Vol. 1, No. 6, pp. 1437-1439, 1963.
[20] Zienkiewicz, O. C., Watson, M., and King, I. P., “A Numerical Method of Visco-Elastic Stress Analysis,” International Journal of Mechanical Sciences, Vol. 10, pp. 807-827, 1968.
[21]-[63] 其余参考文献详见共享盘原始章节文件:../../chapters/01_introduction.md。
习题

1.1 定义“有限单元”这一术语。
1.2 在有限元法中,“离散化”是什么意思?
1.3 现代有限元法的发展始于哪一年?
1.4 直接刚度法是哪一年提出的?
1.5 定义“矩阵”。
1.6 计算机在有限元法的应用中起到了什么作用?
1.7 列出并简要说明有限元法的一般步骤。
1.8 什么是位移法?
1.9 列出四种常见有限单元类型。
1.10 列出三种常用的单元刚度矩阵和单元方程推导方法,并简要说明每种方法。
1.11 “自由度”这一术语指什么?
1.12 列出有限元法应用的五个典型工程领域。
1.13 列出有限元法的五个优点。